


у меня в голове только 2 варианта
на обрабатывающих центрах стоит подшипник с тормозом и пару датчиков
я таких не нашел...
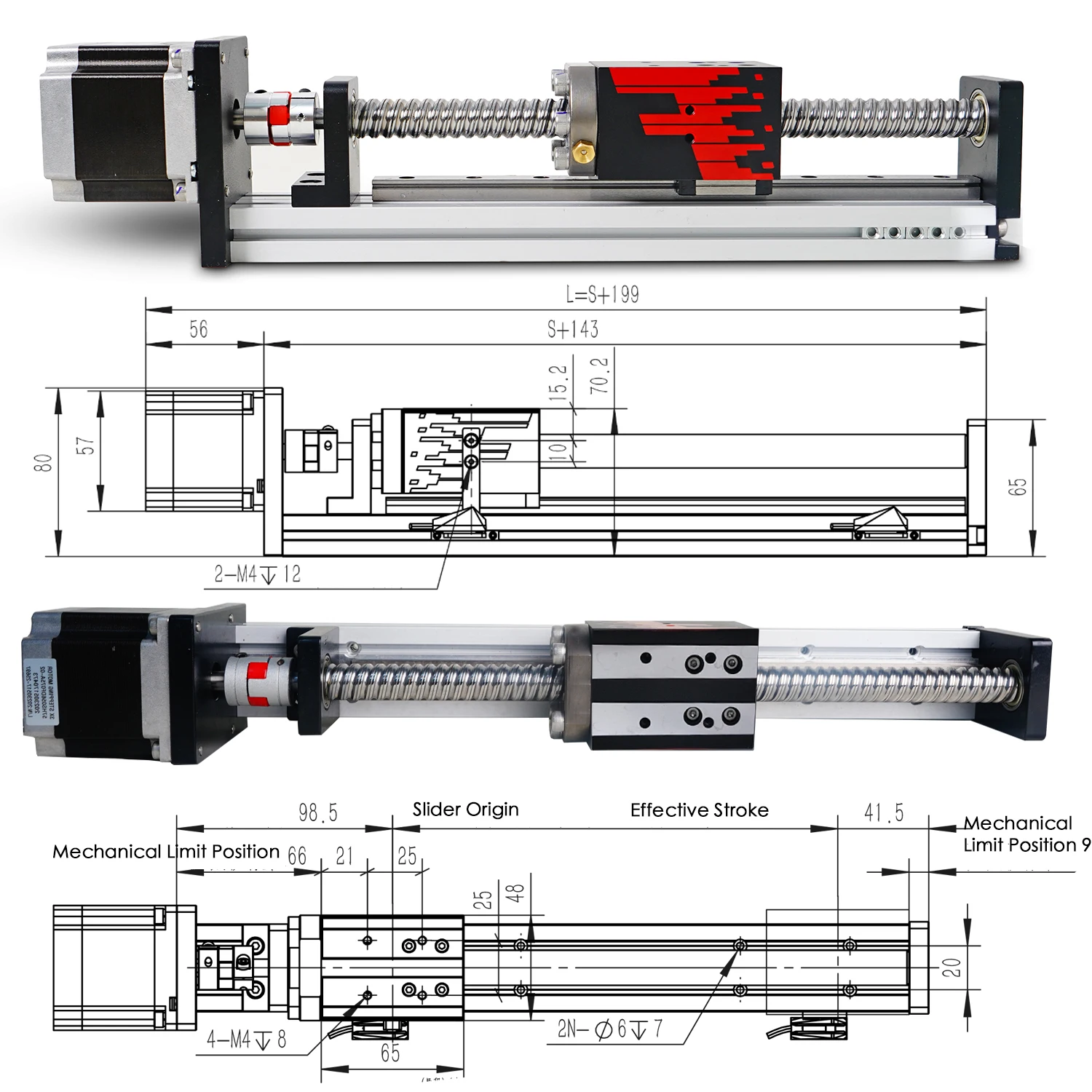
пересмотрел кучу актуаторов с энкодером - маленькая линейная скорость...
кроме как пневматика с тормозом или актуатор с энкодером мне в голову ничего не приходит...
операторы вылет фрезы от балды ставят и получается щетки или не достают или их ушатывает от сильного прижима к изделию...
относительно корректора и координат нет проблем программно задать высоту опускания пылесборника...
вопрос чем двигать и как контролировать положение?
может есть у кого мысли как еще можно реализовать?










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}