
брр, зачем так категорично?
Все рассуждения и предположения исключительно на знаниях законов физики. (ибо по образованию я физик, правда пока еще не к.т.н.) и вообще без привязки к какой либо системе управления, и типам двигателей.
Я лишь утверждаю что точный проход резкого поворота без остановки невозможен.
Если сложно проинтегрировать в уме график скорости чтобы получить координату, то воспользуйтесь треугольником - тангенс угла равен отношению противолежащего к прилежащему.
Т.е. тангенс угла направления движения есть отношение скорости по У к скорости по Х.
а из "есть еще некоторый отерзок времени в течение которого скорость по Y нарастает, но все еще меньше скорости по Х" следует что отношение скоростей У/Х < 1 и соответственно угол меньше 45°. - та самая парабола которую я нарисовал.

Производство плат для управления станком
Автор
Rionet
, 22 Авг 2010 16:44
Сообщений в теме: 56
#41
 OFFLINE
OFFLINE
Rionet
-
- Опытный
-

- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 28 Сентябрь 2010 - 05:24
#42
OFFLINE
halkru
-

- Опытный
-
- 558 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Хабаровск
-
Из:СССР
Отправлено 28 Сентябрь 2010 - 08:02
Эх.. вы это студентам собираетесь читать ?
Хорошо, давайте с малого, а то вдруг и правда кто решит, что "есть еще некоторый отрезок времени"..
Немного о математике, действительно, без привязки к чему - либо в реальной жизни не существует движений или каких-либо изменений по "ломаной"
кривой... но это еще не повод противопоставлять математику реальному положению вещей
Любой шаговый двигатель (в системе в том числе) имеет конечное время синхронного шага (иначе он не будет вращаться) - иногда это выражают в тн скорости подхвата, скорость, на которой шаговый двигатель уверенно стартует и продолжает вращение без пропуска шагов .
Упростим задачу,
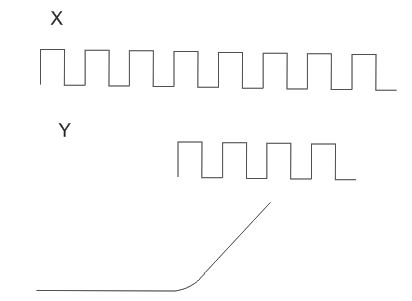
движение по Х происходит с постоянной скоростью, т.е. на его управление подается меандр с постоянной частотой, в точке перегиба подаем меандр на ось У, получаем результат...
"некоторый отрезок времени" - это динамическая погрешность шага (отставание ротора от магнитного поля) в момент старта двигателя по У, можете ее чз тангенс и посчитать.
Точность в жизни определяется исходя из требований конкретного применения.. о какой точности идет речь? мкм, нм? мы же говорим в конве 3D станков тсказать широкого применения.. деревообрабатывающих ... или для рекламы..
Так можно довести до абсурда любое решение... например в начале и конце линейного ускорения сила толчка (вторая производная скорости, первая ускорения) бесконечность , так ведь работают, в реальности...
, так ведь работают, в реальности...
Хорошо, давайте с малого, а то вдруг и правда кто решит, что "есть еще некоторый отрезок времени"..
Немного о математике, действительно, без привязки к чему - либо в реальной жизни не существует движений или каких-либо изменений по "ломаной"
кривой... но это еще не повод противопоставлять математику реальному положению вещей
Любой шаговый двигатель (в системе в том числе) имеет конечное время синхронного шага (иначе он не будет вращаться) - иногда это выражают в тн скорости подхвата, скорость, на которой шаговый двигатель уверенно стартует и продолжает вращение без пропуска шагов .
Упростим задачу,
движение по Х происходит с постоянной скоростью, т.е. на его управление подается меандр с постоянной частотой, в точке перегиба подаем меандр на ось У, получаем результат...
"некоторый отрезок времени" - это динамическая погрешность шага (отставание ротора от магнитного поля) в момент старта двигателя по У, можете ее чз тангенс и посчитать.
... ТОЧНО пройти угол (допустим, под 45 градусов - вот такой _/ ) надо остановиться в угловой точке а потом разгонять синхронно обе оси. (иначе нужно было бы приложить бесконечное ускорение на углу).
Точность в жизни определяется исходя из требований конкретного применения.. о какой точности идет речь? мкм, нм? мы же говорим в конве 3D станков тсказать широкого применения.. деревообрабатывающих ... или для рекламы..
Так можно довести до абсурда любое решение... например в начале и конце линейного ускорения сила толчка (вторая производная скорости, первая ускорения) бесконечность
, так ведь работают, в реальности...
Прикрепленные изображения
#43
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 28 Сентябрь 2010 - 08:56
Ну вот вы и посчитали эту погрешность применительно к шаговику. Все стало понятно, насчет +-1 шаг я конечно переборщил, 20-50% верно )
Кстати это время шага можно оценить по моменту двигателя и массе портала а потом добавить запас на усилие обработки.
Все-таки шаговик упрощает управление - ну и что небольшой перелет, все-равно полем вернется в ту позицию куда попросили шагнуть. Главное не шагнуть еще раз до тех пор пока он туда не пришел
А вот для случая коллекторного двигателя все это пришлось бы отрабатывать контроллеру..
Тут можно полезть еще немного дальше - сознательно заваливать углы с целью увеличить минимальную скорость обработки. Хотя является ли это функцией контроллера - спорно, скорее софта на ПК.
Кстати это время шага можно оценить по моменту двигателя и массе портала а потом добавить запас на усилие обработки.
Все-таки шаговик упрощает управление - ну и что небольшой перелет, все-равно полем вернется в ту позицию куда попросили шагнуть. Главное не шагнуть еще раз до тех пор пока он туда не пришел
А вот для случая коллекторного двигателя все это пришлось бы отрабатывать контроллеру..
Тут можно полезть еще немного дальше - сознательно заваливать углы с целью увеличить минимальную скорость обработки. Хотя является ли это функцией контроллера - спорно, скорее софта на ПК.
#44
OFFLINE
halkru
-
- Опытный
-
- 558 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Хабаровск
-
Из:СССР
Отправлено 28 Сентябрь 2010 - 09:47
.... портала а потом добавить запас на усилие обработки.
...А вот для случая коллекторного двигателя все это пришлось бы отрабатывать контроллеру..
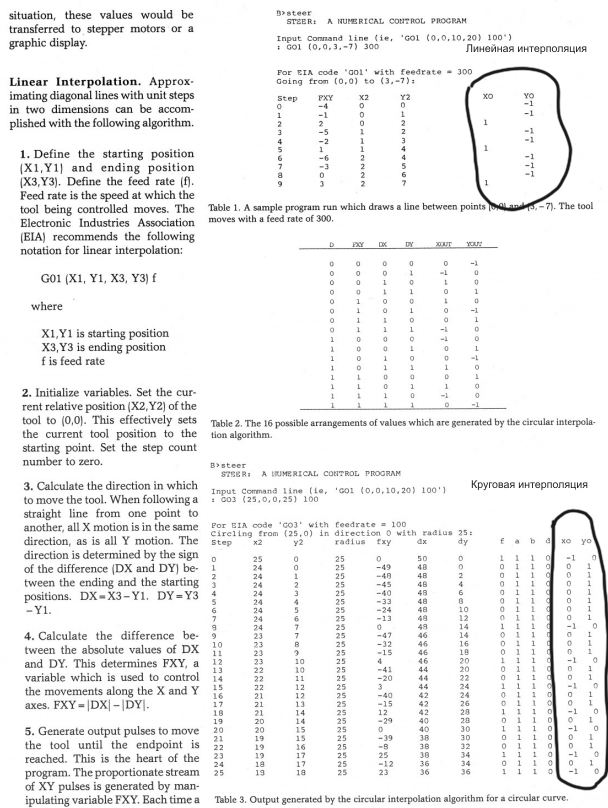
Данный алгоритм не предполагает обработку в т.н G кодах, т.к. в случае интерполяции и постоянной скорости подачи в каждый момент времени может сделать шаг только одна ось.
DC серво на большинстве "бюджетных" китайских станках работают в шаговом режиме при помощи той-же 0501 электроники.. Стойки LNC (Тайвань) и др. могут реализовать полноценный сервопривод с обратной связью.
#45
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 28 Сентябрь 2010 - 22:20
Данный алгоритм не предполагает обработку в т.н G кодах, т.к. в случае интерполяции и постоянной скорости подачи в каждый момент времени может сделать шаг только одна ось.
Не совсем понял, можете развернуть мысль?
Кстати насчет аппроксимаций, идеология ломаных будет очень плохо работать на корявом G-коде где например точность аппроксимации выставили 0.001 и там ломаных описано в десять раз больше чем есть шагов.
Оптимальной вижу представление программы в виде потока шагов по типу х+ х+ у+ х+ у+ х+ х+ у- у- z+ .. с указанием пользовательских ограничений скорости по участкам. Т.е. сначала G-код надо распарсить в такой вид, а далее уже скормить исполнялке которая будет думать как этот квест пройти чтобы ничего не пропустить.
Не совсем понял, можете развернуть мысль?
Кстати насчет аппроксимаций, идеология ломаных будет очень плохо работать на корявом G-коде где например точность аппроксимации выставили 0.001 и там ломаных описано в десять раз больше чем есть шагов.
Оптимальной вижу представление программы в виде потока шагов по типу х+ х+ у+ х+ у+ х+ х+ у- у- z+ .. с указанием пользовательских ограничений скорости по участкам. Т.е. сначала G-код надо распарсить в такой вид, а далее уже скормить исполнялке которая будет думать как этот квест пройти чтобы ничего не пропустить.
#46
OFFLINE
halkru
-
- Опытный
-
- 558 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Хабаровск
-
Из:СССР
Отправлено 29 Сентябрь 2010 - 13:53
Как вы предполагали в каком-то посте - рассчитать количество импульсов для каждой оси, исходя из скорости - рассчитать частоту, и насыпать одновременно по осям(сгенерировать аппаратно) , действительно, это очень просто, если еще и не добавлять ускорения - практически простая задача. Собственно, так оно и делается при тн "прыжке" - холостом, быстром перемещении..
Но, в этом случае есть один вопрос - при наложении шагов дельта ХУ, те скорость портала не будет постоянной, например делта ХУ, при одновременном поступлении шагов будет движение "/" , при последовательном "_!"
В случае CNC обработки, скорость подачи инструмента имеет большое значение.. поэтому алгоритм интерполяции "на выходе" дает попеременно сигнал "степ" для осей, как вы и представили ниже, т.е. например, для перемещения под 45% будет так Х,У,Х,У ..., что позволяет сохранить "подачу" постоянной
Но, в этом случае есть один вопрос - при наложении шагов дельта ХУ, те скорость портала не будет постоянной, например делта ХУ, при одновременном поступлении шагов будет движение "/" , при последовательном "_!"
В случае CNC обработки, скорость подачи инструмента имеет большое значение.. поэтому алгоритм интерполяции "на выходе" дает попеременно сигнал "степ" для осей, как вы и представили ниже, т.е. например, для перемещения под 45% будет так Х,У,Х,У ..., что позволяет сохранить "подачу" постоянной
#47
OFFLINE
GuruCnc
-

- Пользователи+
-
- 261 сообщений
Бакалавр CNC
- Пол:Мужчина
- Город:Новосибирск
-
Из:Новосибирск
Отправлено 29 Сентябрь 2010 - 18:39
halkru
Вот вы сколько станков с DSP продаете в год?
Вот вы сколько станков с DSP продаете в год?
#48
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 29 Сентябрь 2010 - 22:46
Ну, для начала думаю стоит определиться с тем что скорость движения в принципе не может быть постоянной только потому что оно делается ШАГАМИ. Т.е. рывками.
Скорость подачи следует расчитывать на интервале содержащим БОЛЬШОЕ число шагов, т.е. проводить УСРЕДНЕНИЕ. Для инструмента имеет значение именно эта скорость, т.к. мелкие колебания при шагании все-равно сгладятся механикой.
Так вот, если мы проквантуем время, и будем делать ровно по 1 шагу в единицу времени, то мы не сохраним постоянную скорость подачи для произвольного пути! Для прямой это будет работать. А даже если рассмотреть наш пресловутый угол "_/" то при движении по Х СРЕДНЯЯ скорость будет равна 1 шагу/ед времени, а при движении под 45 градусов ~0.7 шага/ед времени (корень из двух пополам).
Так что для произвольной траектории нужен более сложный алгоритм, либо надо смириться с погрешностью в скорости в ~30%..
Скорость подачи следует расчитывать на интервале содержащим БОЛЬШОЕ число шагов, т.е. проводить УСРЕДНЕНИЕ. Для инструмента имеет значение именно эта скорость, т.к. мелкие колебания при шагании все-равно сгладятся механикой.
Так вот, если мы проквантуем время, и будем делать ровно по 1 шагу в единицу времени, то мы не сохраним постоянную скорость подачи для произвольного пути! Для прямой это будет работать. А даже если рассмотреть наш пресловутый угол "_/" то при движении по Х СРЕДНЯЯ скорость будет равна 1 шагу/ед времени, а при движении под 45 градусов ~0.7 шага/ед времени (корень из двух пополам).
Так что для произвольной траектории нужен более сложный алгоритм, либо надо смириться с погрешностью в скорости в ~30%..
#49
OFFLINE
GuruCnc
-
- Пользователи+
-
- 261 сообщений
Бакалавр CNC
- Пол:Мужчина
- Город:Новосибирск
-
Из:Новосибирск
Отправлено 30 Сентябрь 2010 - 06:45
 Ну написал так написал!
Ну написал так написал!
#50
OFFLINE
Admin
-
- Главные администраторы
-
- 1 749 сообщений
"Добрый" Админ
- Пол:Мужчина
-
Из:Мир-CNC
Отправлено 30 Сентябрь 2010 - 09:42
GuruCnc, у Вас частенько проскакивают сообщений из ряда «О, чего я знаю…, Но ни кому не скажу...». Если есть, что написать по существу, так и пишите по существу! Если нет, так лучше промолчать. Иначе это просто флуд 
Незнание правил форума не освобождает от ответственности!
Правила для раздела «Доска объявлений»
Вопросы по работе форума
Правила для раздела «Доска объявлений»
Вопросы по работе форума
#51
OFFLINE
GuruCnc
-
- Пользователи+
-
- 261 сообщений
Бакалавр CNC
- Пол:Мужчина
- Город:Новосибирск
-
Из:Новосибирск
Отправлено 30 Сентябрь 2010 - 11:47
Полностью согласен - я флудю... или нет - флужу... нет - занимаюсь флудячеством!GuruCnc, у Вас частенько проскакивают сообщений из ряда «О, чего я знаю…, Но ни кому не скажу...». Если есть, что написать по существу, так и пишите по существу! Если нет, так лучше промолчать. Иначе это просто флуд
По теме... даже не знаю что сказать, но всё-таки скажу: А ВЫ НАЧНИТЕ ДЕЛАТЬ, там все дилетанские вопросы и развеятся сами собой. Пока не начнете делать, вопросов будет появляться больше и больше и больше и больше и больше.... тем более в такой сложной для вас теме.
Сообщение отредактировал GuruCnc: 30 Сентябрь 2010 - 11:48
#52
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 30 Сентябрь 2010 - 12:05
Не согласен. Когда делаешь что-то, то вопросы и появляются. Ибо реализация всегда сложнее чем кажется на первый взгляд.
Подход к проектированию идет по схеме ПРИНЦИПЫ -> АЛГОРИТМЫ -> РЕАЛИЗАЦИЯ. Причем в обратную сторону это не работает. (ну есть еще дилетантский подход типа сделать чего-нибудь, потом его потестить, понять что сделал ерунду, начать переделывать и сделать следующую ерунду).
Принципы можно обсудить на форуме, алгоритмы врядли, разве что какие-то важные детали, реализация уже дело каждого.
Подход к проектированию идет по схеме ПРИНЦИПЫ -> АЛГОРИТМЫ -> РЕАЛИЗАЦИЯ. Причем в обратную сторону это не работает. (ну есть еще дилетантский подход типа сделать чего-нибудь, потом его потестить, понять что сделал ерунду, начать переделывать и сделать следующую ерунду).
Принципы можно обсудить на форуме, алгоритмы врядли, разве что какие-то важные детали, реализация уже дело каждого.
#53
OFFLINE
halkru
-
- Опытный
-
- 558 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Хабаровск
-
Из:СССР
Отправлено 30 Сентябрь 2010 - 13:06
Вот пример линейной и круговой интерполяции тсказать на выходе..
Прикрепленные изображения
#54
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 30 Сентябрь 2010 - 14:11
Ну да, это как раз к интерполяции. Только вот если мы будем импульсы выдавать через равные промежутки времени, то постоянной скорости резания не получится. Задержка для каждого импульса должна отдельно считаться. Там кажется за это отвечает параметр FDX, правда описание на следующей странице.
Кстати да, у меня же есть доступ к библиотеке IEEE... надо поискать статьи на тему.
Кстати да, у меня же есть доступ к библиотеке IEEE... надо поискать статьи на тему.
#55
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 02 Октябрь 2010 - 04:36
Провел небольшой лит-обзор, теперь с месяц можно изучать )
Кто хочет поднять свои знания в области ЧПУ - вот сами статьи (43Мб, англ) или тут
Правда конкретно по этой теме там немного, все больше про сервоприводы на основе FPGA
Порадовало также описание методов бездатчикового контроля положения шаговика. Интересно, почему не применяется, считалки сейчас вроде не шибко дорогие.
Есть описания look-ahead алгоритмов. Кстати очень много на тему которую мы обсуждали - углы, погрешности и интерполяция..
Забавно также было найти статью на китайском с описанием контроллера на основе TMS320 ) ничего не напоминает?
Кто хочет поднять свои знания в области ЧПУ - вот сами статьи (43Мб, англ) или тут
Правда конкретно по этой теме там немного, все больше про сервоприводы на основе FPGA
Порадовало также описание методов бездатчикового контроля положения шаговика. Интересно, почему не применяется, считалки сейчас вроде не шибко дорогие.
Есть описания look-ahead алгоритмов. Кстати очень много на тему которую мы обсуждали - углы, погрешности и интерполяция..
Забавно также было найти статью на китайском с описанием контроллера на основе TMS320 ) ничего не напоминает?
#56
OFFLINE
Евгений(К)
-

- Опытный
-
- 650 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Казахстан Костанай
-
Из:Костанай
Отправлено 18 Январь 2011 - 03:56
 даже не мог подумать что тут такие баталии ведутся)!...кое что конечно под черпнул! оказывается когда людям интересно они могут много интересного рассказать..спасибо
даже не мог подумать что тут такие баталии ведутся)!...кое что конечно под черпнул! оказывается когда людям интересно они могут много интересного рассказать..спасибо 
Провел небольшой лит-обзор, теперь с месяц можно изучать )
Кто хочет поднять свои знания в области ЧПУ - вот сами статьи (43Мб, англ) или тут
что то скачать не могу..может пере зальёшь?на литетби или дипозит
Везде повсюду ориентиры, а мы в свой сломанный компас
#57
OFFLINE
Rionet
-
- Опытный
-
- 616 сообщений
Доктор CNC
- Пол:Мужчина
- Город:Волгоград
-
Из:Волгоград
Отправлено 18 Январь 2011 - 04:09
Первая ссылка на мегааплоад живая
Количество пользователей, читающих эту тему: 1
0 пользователей, 1 гостей, 0 анонимных

