


Кто собирал станок на данном контроллере? вопрос вот в чем:
1.не работает подчинение осей;(пробовал одинаковые настройки для обеих осей и так и этак, вообщем задолбался, собрал схемку что-бы работало два движка от одной оси и выравнивание портала по двум датчикам было )
2. пройденный путь зависит от скорости перемещения . Допустим при скорости 1200мм/мин (это 60% от максимальной) при Y0> Y500 проходит 501мм, а при
100мм/мин 499мм. То есть, при одной скорости перемещения по одному замкнутому вектору повторяемость сохраняется,но если есть холостые переходы и скорость меняется то точности отработки траектории и повторяемости отработки траектории нет.
есть предположение что криво написали программу для контроллера, или плагин.
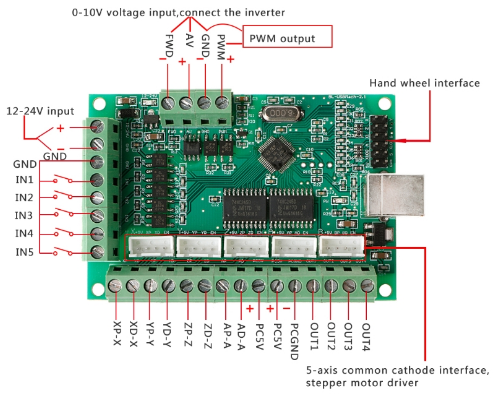
Прикрепленные изображения
Сообщение отредактировал retfie: 11 Июль 2019 - 17:21

